Fatemeh Zargarbashi
Robotics, Character animation, Reinforcement learning

PhD Candidate,
ETH Zurich,
Disney research | Studios
Hi! I’m Fatemeh.
I am a Ph.D. candidate in Computer Science jointly at ETH Zurich (Computational Robotics Lab) and Disney research Studios. My research lies in bridging the gap between robotics and character animation by investigating how to develop natural motions on legged robots and how to control physics-based animated characters. I am also interested in developing reinforcement learning algorithms for character control, legged locomotion, and motion generation.
I received my M.Sc. in Mechanical Engineering, Control from Sharif University of Technology, Tehran, Iran. During my master thesis I worked on the development and control of an over-actuated quadcopter for agile maneuvers.
In my free time, I like cycling, swimming and reading poetry. I am also an amateur astronomer and I like to go stargazing ![]() whenever I have the chance. Recently, I have started exploring night sky photography
whenever I have the chance. Recently, I have started exploring night sky photography ![]() !
!
News
| Oct 02, 2025 | I had the opportunity to be at CoRL and Humanoids conferences to promote some of our recent works. It’s quite an exciting time to be a roboticist! Every week a new company unveils their robot hardware, and every day you see a new interesting idea in the academic papers. Can’t imagine how our robotic world will look like in 10 years, but it’s going to be exciting! See video |
|---|---|
| Jul 05, 2025 | We hosted a booth in the annual ETH RobotX innovation day, with a couple of demos of our research and robots! see post on linkedin |
| Sep 05, 2024 | I’m thrilled to share that our paper, “RobotKeyframing: Learning Locomotion with High-Level Objectives via Mixture of Dense and Sparse Rewards”, has been accepted at CoRL 2024! 🎉 [arxiv], [youtube] |
Latest posts
| Jan 06, 2026 | Generative Motion Synthesis Lecture |
|---|---|
| Jul 08, 2025 | Try DeepMimic in Isaacgym with our assignment |
Selected publications
-
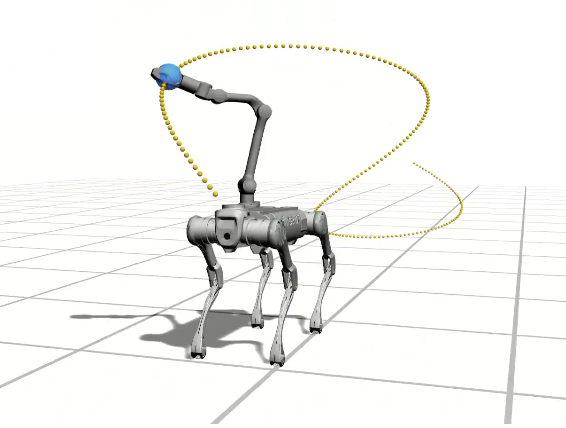 Whole-Body Inverse Dynamics MPC for Legged Loco-ManipulationIEEE Robotics and Automation Letters, 2025
Whole-Body Inverse Dynamics MPC for Legged Loco-ManipulationIEEE Robotics and Automation Letters, 2025 -
 APEX: Action Priors Enable Efficient Exploration for Robust Motion Tracking on Legged RobotsarXiv preprint arXiv:2511.09091, 2025
APEX: Action Priors Enable Efficient Exploration for Robust Motion Tracking on Legged RobotsarXiv preprint arXiv:2511.09091, 2025 -
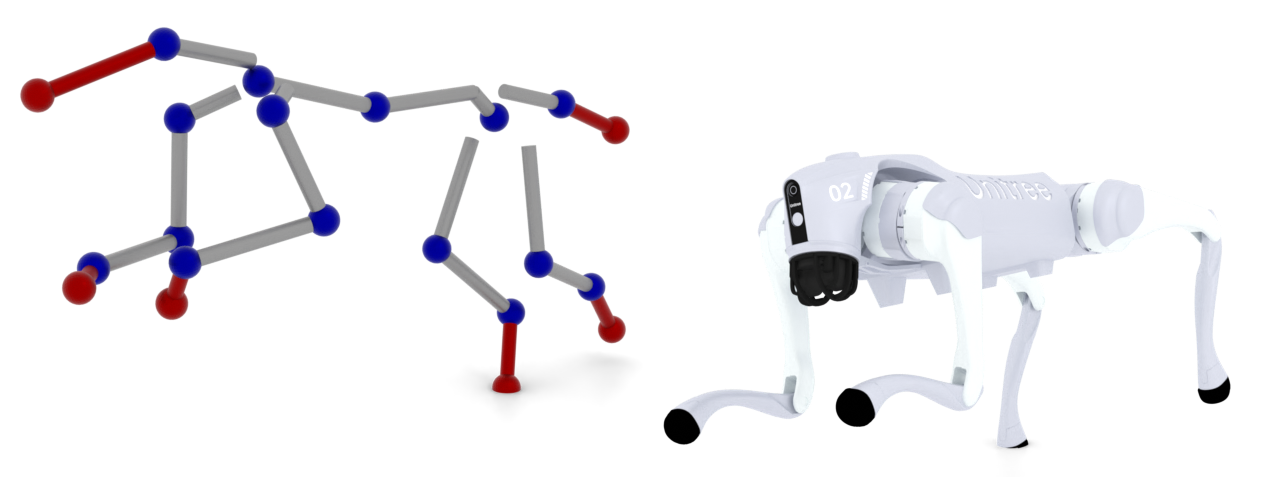 Learning Steerable Imitation Controllers from Unstructured Animal MotionsarXiv preprint arXiv:2507.00677, 2025
Learning Steerable Imitation Controllers from Unstructured Animal MotionsarXiv preprint arXiv:2507.00677, 2025 -
 RobotKeyframing: Learning Locomotion with High-Level Objectives via Mixture of Dense and Sparse Rewards8th Conference on Robot Learning (CoRL), 2024
RobotKeyframing: Learning Locomotion with High-Level Objectives via Mixture of Dense and Sparse Rewards8th Conference on Robot Learning (CoRL), 2024 -
 MetaLoco: Universal Quadrupedal Locomotion with Meta-Reinforcement Learning and Motion ImitationarXiv preprint arXiv:2407.17502, 2024
MetaLoco: Universal Quadrupedal Locomotion with Meta-Reinforcement Learning and Motion ImitationarXiv preprint arXiv:2407.17502, 2024 -
 Rl+ model-based control: Using on-demand optimal control to learn versatile legged locomotionIEEE Robotics and Automation Letters, 2023
Rl+ model-based control: Using on-demand optimal control to learn versatile legged locomotionIEEE Robotics and Automation Letters, 2023