Publications
A comprehensive list of publications.
2025
-
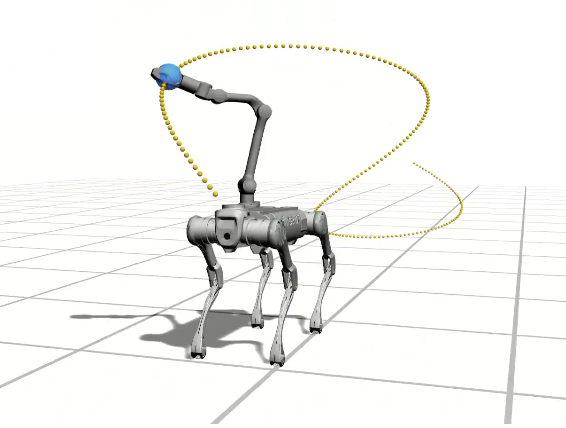 Whole-Body Inverse Dynamics MPC for Legged Loco-ManipulationIEEE Robotics and Automation Letters, 2025
Whole-Body Inverse Dynamics MPC for Legged Loco-ManipulationIEEE Robotics and Automation Letters, 2025 -
 APEX: Action Priors Enable Efficient Exploration for Robust Motion Tracking on Legged RobotsarXiv preprint arXiv:2511.09091, 2025
APEX: Action Priors Enable Efficient Exploration for Robust Motion Tracking on Legged RobotsarXiv preprint arXiv:2511.09091, 2025 -
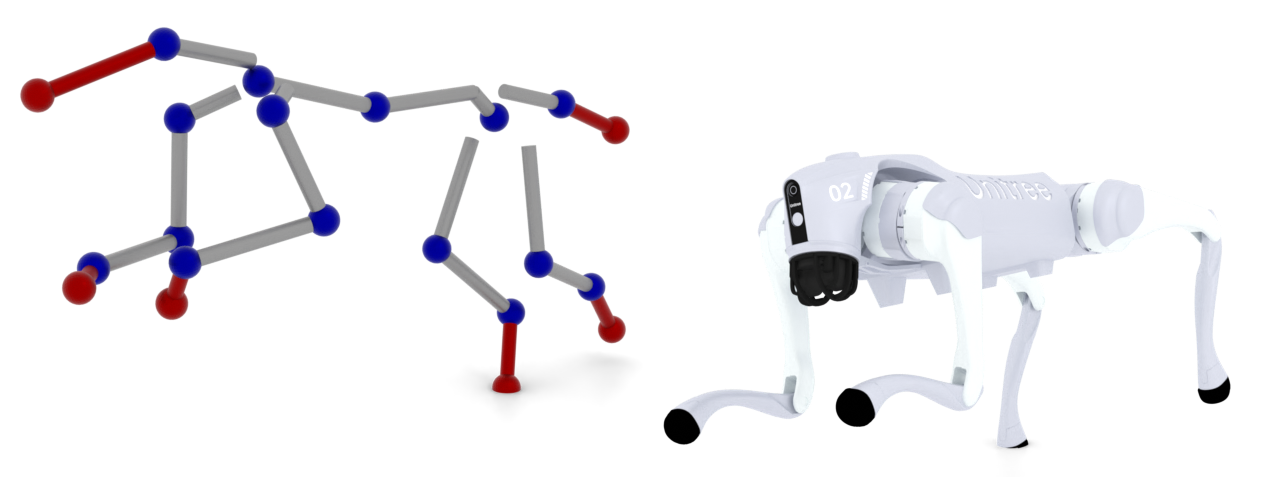 Learning Steerable Imitation Controllers from Unstructured Animal MotionsarXiv preprint arXiv:2507.00677, 2025
Learning Steerable Imitation Controllers from Unstructured Animal MotionsarXiv preprint arXiv:2507.00677, 2025 -
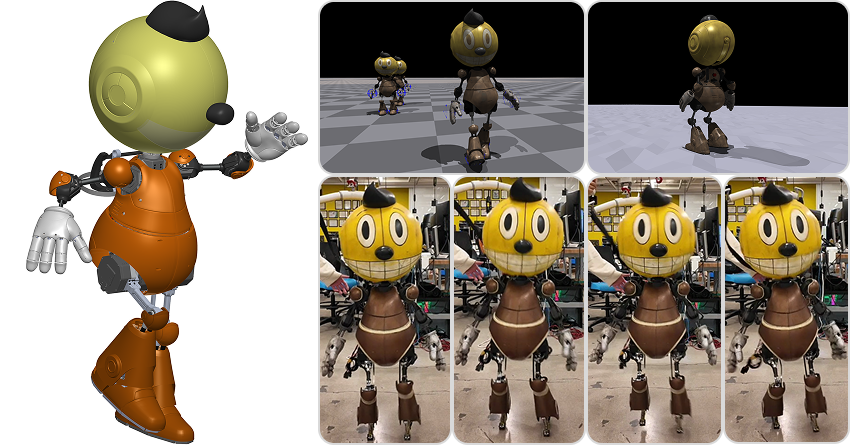 Learning to Walk in Costume: Adversarial Motion Priors for Aesthetically Constrained HumanoidsIEEE-RAS 24th International Conference on Humanoid Robots (Humanoids), 2025
Learning to Walk in Costume: Adversarial Motion Priors for Aesthetically Constrained HumanoidsIEEE-RAS 24th International Conference on Humanoid Robots (Humanoids), 2025
2024
-
 RobotKeyframing: Learning Locomotion with High-Level Objectives via Mixture of Dense and Sparse Rewards8th Conference on Robot Learning (CoRL), 2024
RobotKeyframing: Learning Locomotion with High-Level Objectives via Mixture of Dense and Sparse Rewards8th Conference on Robot Learning (CoRL), 2024 -
 MetaLoco: Universal Quadrupedal Locomotion with Meta-Reinforcement Learning and Motion ImitationarXiv preprint arXiv:2407.17502, 2024
MetaLoco: Universal Quadrupedal Locomotion with Meta-Reinforcement Learning and Motion ImitationarXiv preprint arXiv:2407.17502, 2024 -
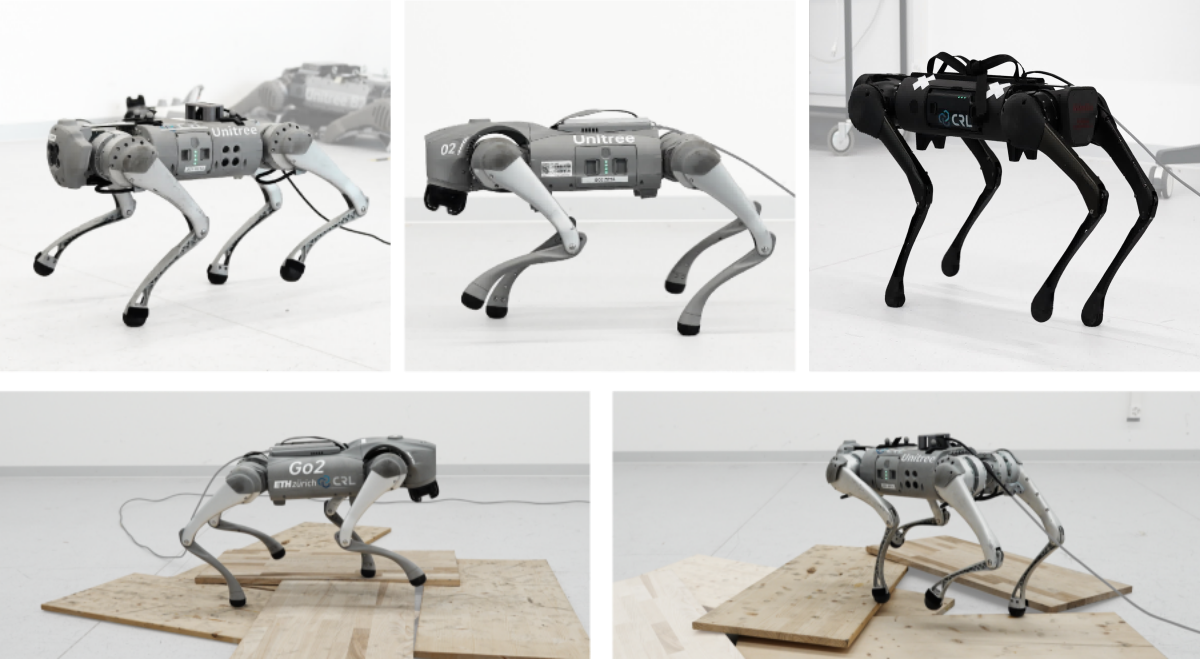
 Deep Compliant Control for Legged RobotsIn 2024 IEEE International Conference on Robotics and Automation (ICRA), 2024
Deep Compliant Control for Legged RobotsIn 2024 IEEE International Conference on Robotics and Automation (ICRA), 2024
2023
-
 Rl+ model-based control: Using on-demand optimal control to learn versatile legged locomotionIEEE Robotics and Automation Letters, 2023
Rl+ model-based control: Using on-demand optimal control to learn versatile legged locomotionIEEE Robotics and Automation Letters, 2023 -
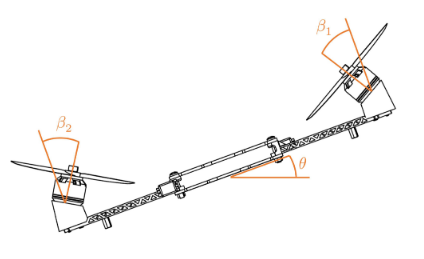 Quadcopter Stability: The Effects of CoM, Dihedral Angle and Its UncertaintyIranian Journal of Science and Technology, Transactions of Mechanical Engineering, 2023
Quadcopter Stability: The Effects of CoM, Dihedral Angle and Its UncertaintyIranian Journal of Science and Technology, Transactions of Mechanical Engineering, 2023
2022
-
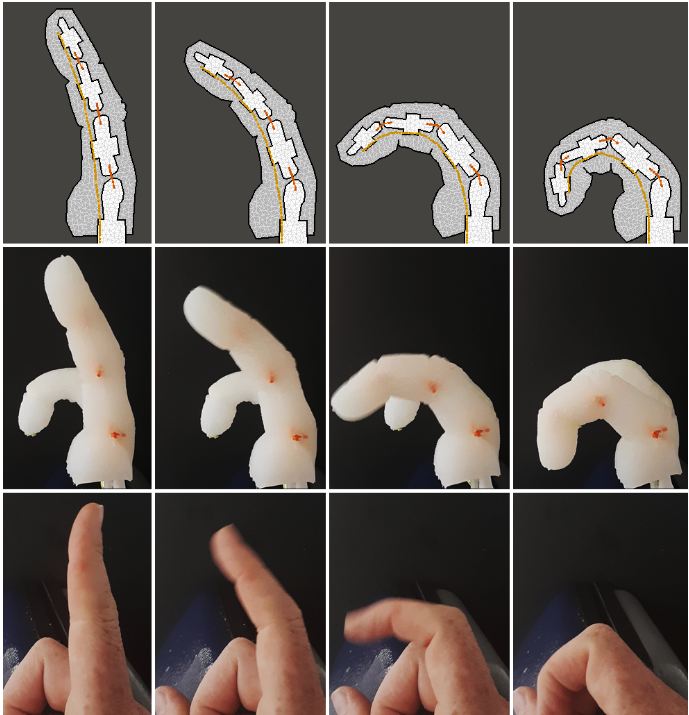 Simulation and fabrication of soft robots with embedded skeletonsIn 2022 International Conference on Robotics and Automation (ICRA), 2022
Simulation and fabrication of soft robots with embedded skeletonsIn 2022 International Conference on Robotics and Automation (ICRA), 2022